

What is Inertial Navigation?
Inertial Navigation is the practice of using Inertial Measurement Units (IMUs) to generate a vehicle orientation and trajectory. An IMU measures accelerations and rotations on 3 orthogonal axes and this can then be fused with other sensors. Traditionally this is used in conjunction with a location system such as GNSS to provide a real-world location, however commercially available INS systems also support barometers, wheel sensors, doppler velocity and a whole range of other inputs.
Inertial Navigation vs GPS
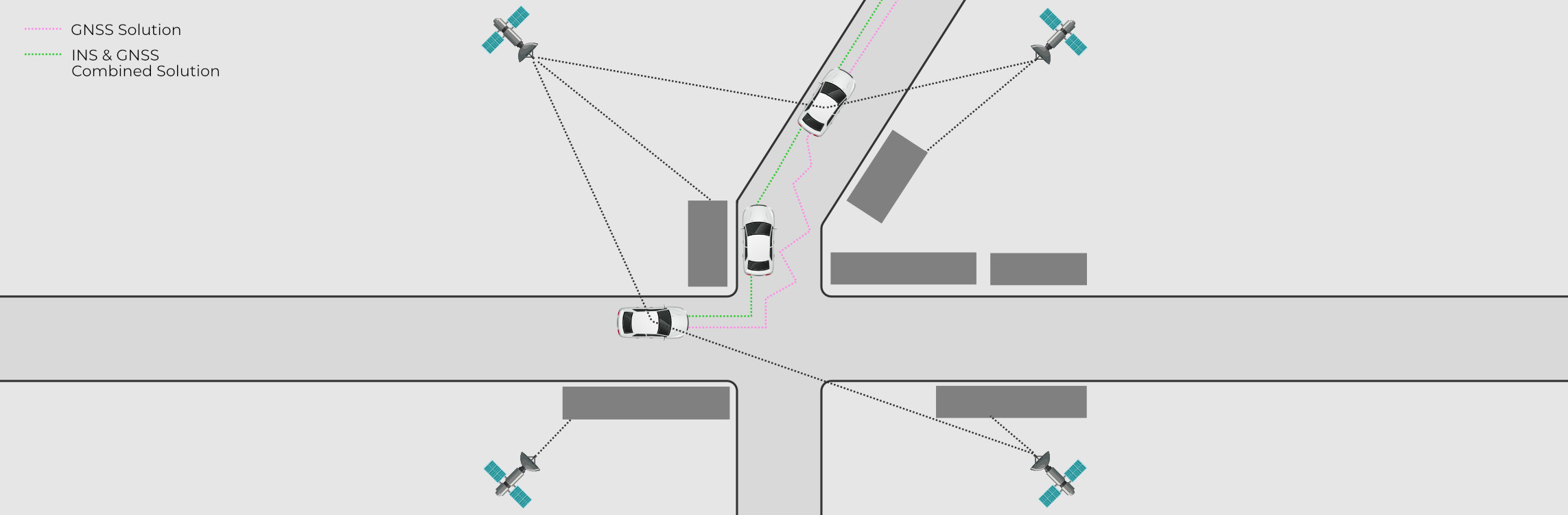
GNSS on its own needs a good sky view to provide a reliable position, and can therefore be vulnerable to blockages in skyview, e.g. tunnels, under bridges etc. The GNSS signals are also weak, so vulnerable to external interference, e.g. jamming. Inertial Navigation Systems (INS) don’t rely on continuous satellite visibility to continue giving position updates so are more resistant to the effects of jamming, interference and skyview outages. INS provide greater detail than GNSS alone, providing a position, velocity and attitude solution at much higher update rates, e.g. 100Hz+.
Why use an Inertial Navigation System?
Using a full Inertial Navigation System (INS) bridges gaps in GNSS to increase position solution availability, a 3D position, velocity and attitude solution, and higher sampling rates than the GNSS receiver alone. Applications that suit an INS are many and varied, including vehicle navigation, aerial survey, hydrographic survey, rail survey, antenna pointing and high-dynamics applications.
Forsberg supply the complete range of INS from NovAtel and Inertial Labs, offering a solution for all capability levels and price points.
Click here for more information on Inertial Navigation Systems
